H-tiltas (angl. H-bridge) – vienas iš populiariausiai naudojamų elektronikos komponentų robototechnikoje. Kas tai ir kam jis reikalingas?
H-tiltas (angl. H-bridge) – vienas iš populiariausiai naudojamų elektronikos komponentų robototechnikoje. Kas tai ir kam jis reikalingas?
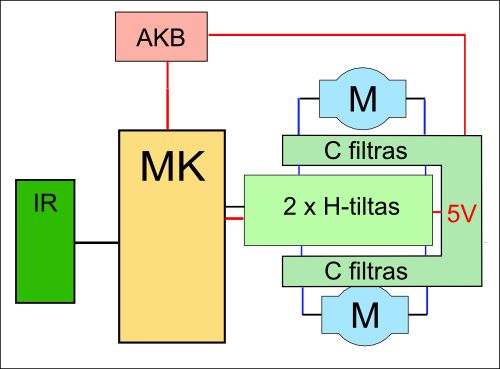
Su H-tiltu galime keisti poliariškumą apkrovai, o tai labai patogu valdyti pastovios srovės kolektorinius variklius. Kam naudojami varikliukai robototechnikoje manau nereikia pasakoti 🙂
Kodėl pavadintas H-tiltu? Pažiūrėjus į principinę schema – jungimas labai panašus į H raidę, nuo to ir kilo pavadinimas.

S1-S4 – jungikliai, M – kolektorinis variklis. Sakysim, kad S1=0 – jungiklis išjungtas, S1=1 – jungiklis įjungtas.
Kai {S1,S4}=1 ir {S2,S3}=0 – variklis sukasi pagal laikrodžio rodyklę (sąlyginai)

Kai {S2,S3}=1 ir {S1,S4}=0 – variklis sukasi prieš laikrodžio rodyklę

Reikšmių lentelė:
|
S1
|
S2
|
S3
|
S4
|
Rezultatas
|
|
1
|
0
|
0
|
1
|
Sukasi pagal laikrodžio rodyklę
|
|
0
|
1
|
1
|
0
|
Sukasi prieš laikrodžio rodyklę
|
|
0
|
0
|
0
|
0
|
Laisvas variklio sukimasis
|
|
0
|
1
|
0
|
1
|
Variklio stabdymas
|
|
1
|
0
|
1
|
0
|
Variklio stabdymas
|
|
1
|
1
|
0
|
0
|
Neleistinas jungimas
|
|
0
|
0
|
1
|
1
|
Neleistinas jungimas
|
Toks jungimas deja turi savo trūkumų – yra valdymo kombinacijų, kurių naudoti draudžiama – gaunamas trumpas schemos jungimas.
Supaprastintas H-tilto pavyzdys – elektrinė schema kurioje naudojamos dvi rėlės (R1, R2) ir 2 jungikliai (S1, S2):
Čia valdymas kur kas paprastesnis. Kai S1=1 ir S2=0 – variklis sukasi pagal laikrodžio rodyklę
ir kai S1=0 ir S2=1 – variklis sukasi prieš laikrodžio rodyklę

Reikšmių lentelė:
|
S1
|
S2
|
Rezultatas
|
|
1
|
0
|
Sukasi pagal laikrodžio rodyklę
|
|
0
|
1
|
Sukasi prieš laikrodžio rodyklę
|
|
0
|
0
|
Variklio stabdymas
|
|
1
|
1
|
Variklio stabdymas
|
Rėlinis variklių valdymas retai kur naudojamas, nebent reikia apkrauti didelio galingumo pavaras. Jų minusas tas, kad nėra galimybės reguliuoti variklio apsukų. Bet šiuolaikinėje radioelektronikoje H-tiltai daromi tranzistoriniai o kai kuriais atvėjais naudojamos specializuotos mikroschemos, pvz L29Xx

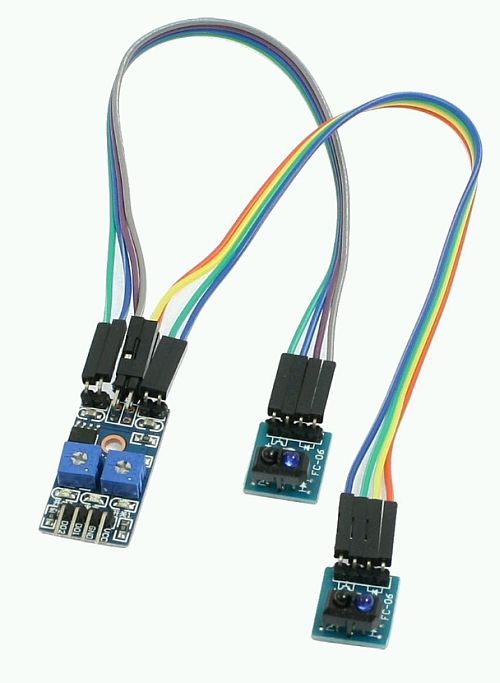
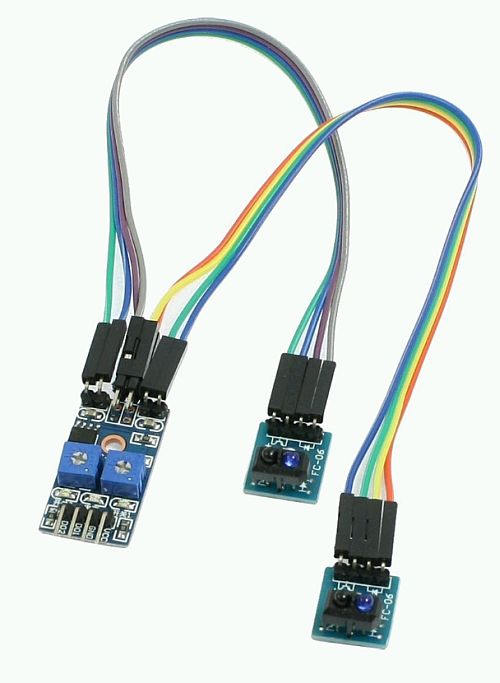 Kadangi rungtis – linijos sekimas, mūsų robotukas turi aptikti tą liniją. Linijos aptikimui naudosime infraraudonųjų spindulių daviklius. Pats daviklis sudarytas iš infraraudonųjų spindulių (IR) siūstuvo – IR šviesos diodo, IR imtuvo – IR foto diodo ir komparatoriaus, kuris analoginį signalą pavers į skaitmeninį.
Kadangi rungtis – linijos sekimas, mūsų robotukas turi aptikti tą liniją. Linijos aptikimui naudosime infraraudonųjų spindulių daviklius. Pats daviklis sudarytas iš infraraudonųjų spindulių (IR) siūstuvo – IR šviesos diodo, IR imtuvo – IR foto diodo ir komparatoriaus, kuris analoginį signalą pavers į skaitmeninį.